pitch yaw roll是什么
本文共 783 字,大约阅读时间需要 2 分钟。
关于旋转永远是做游戏的难点和混乱点。我们知道表示一个旋转有多种方式,简单的欧拉角,复杂点的四元数,再复杂点的矩阵。之前接触unity可以用四元数和欧拉角两种方式表示旋转,最近一直研究虚幻引擎,目前只看到了欧拉角这一种旋转方式。
欧拉角是表达旋转的最简单的一种方式,形式上它是一个三维向量,其值分别代表物体绕坐标系三个轴(x,y,z轴)的旋转角度。这样的话,很容易想到,同样的一个三维向量,代表了绕x,y,z的旋转值,先进行那个旋转是否对结果有影响呢?显然是有影响的,可以拿着你的手机试一下,不同的旋转顺序会代表不同的旋转结果。所以,一般引擎都会规定自己的旋转顺序。
下面三张动图形象的表示了欧拉角的旋转方式。第一张是绕x轴旋转pitch,第二张绕y轴旋转yaw,第三张是绕z轴旋转roll。


绕三个轴的旋转值pitch,yaw,roll来自航空界的叫法,翻译为俯仰角,偏航角,翻滚角,非常形象。它们不一定如上所述,一定分别代表绕x,y,z的旋转值。
从英文意思出发,roll:是卷;滚动,转动;辗的意思; yaw是(火箭、飞机、宇宙飞船等)偏航的意思; pitch是倾斜;投掷;搭帐篷;坠落的意思; 所以,roll的意思是翻滚,就是绕着机身所在的那个轴。yaw是偏航的意思,偏航就是绕着重力方向为轴。pitch倾斜、坠落的意思,坠落就是以翅膀所在的直线为轴发生旋转。另外值得注意的是,pitch值是不能超过90度,这里牵扯到了万向锁的知识,不再多说,网上很多讨论。
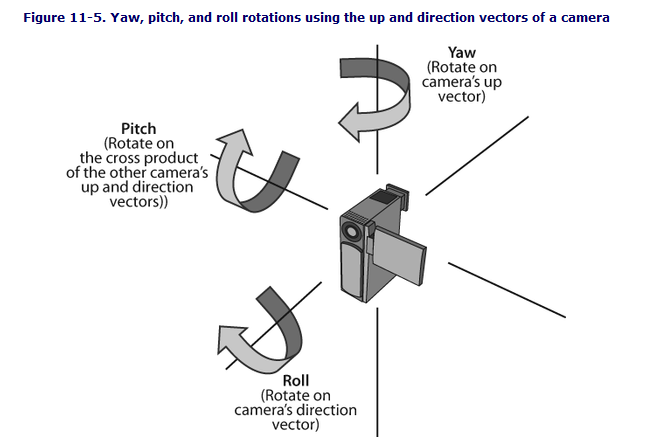
下面这张图是以摄像机的角度来阐述欧拉角的,可以加深理解。可以看到,pitch,yaw,roll在这里并不是常见的代表绕x,y,z的旋转值。
本文转自莫水千流博客园博客,原文链接:http://www.cnblogs.com/zhoug2020/p/7636588.html,如需转载请自行联系原作者
你可能感兴趣的文章
js随笔
查看>>
Java逆向基础之打印所有类名
查看>>
Andrdoid Sensors Overview (探测器概述)二
查看>>
使用screen实现字符桌面共享
查看>>
css hack的认识
查看>>
photoshop制作透明背景图片
查看>>
通过vftps和虚拟帐号增强ftp的安全性
查看>>
HBase Filter使用方法(三)------批量put导入
查看>>
CentOS下httpd与tomcat整合
查看>>
oracle group by 行转列 分析执行计划
查看>>
ubuntu10.04基本设置
查看>>
SCCM Deploy Microsoft Teams
查看>>
领域模型设计的见解
查看>>
linux命令:pwd
查看>>
linux用户权限相关内容查看
查看>>
孤陋寡闻之不用电池的阵列卡
查看>>
linux虚拟化之openvz
查看>>
Java那些坑(1):Java7的substring
查看>>
我的友情链接
查看>>
千里传字 随时随地签批
查看>>